课程简介
本课程将带领你制作一个电动车模型,学习如何控制电动车前进、后退和停止,并了解倒车雷达的基本原理。
视频:电动车(前后移动)演示
目录
- 知识点
- 学习任务
- 搭建
- 编程
一、知识点
倒车雷达系统
倒车雷达是汽车驻车或者倒车时的安全辅助装置。倒车雷达主要由超声波传感器、控制器和显示器或蜂鸣器等组成。
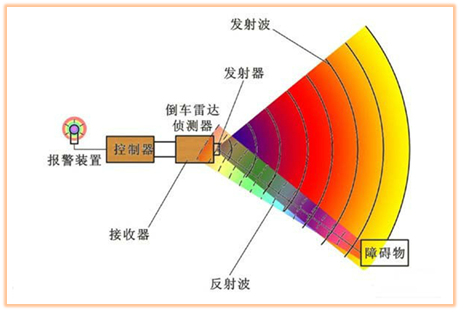
图1 倒车雷达原理
二、学习任务
搭建一个倒车雷达模型,当倒车距离过近时车轮前进。
三、搭建
1. 实验材料
Arduino主控板模块、电池盒、轮子、车轮卡扣、齿轮马达、开关、超声波模块、电机驱动器、软硬导线
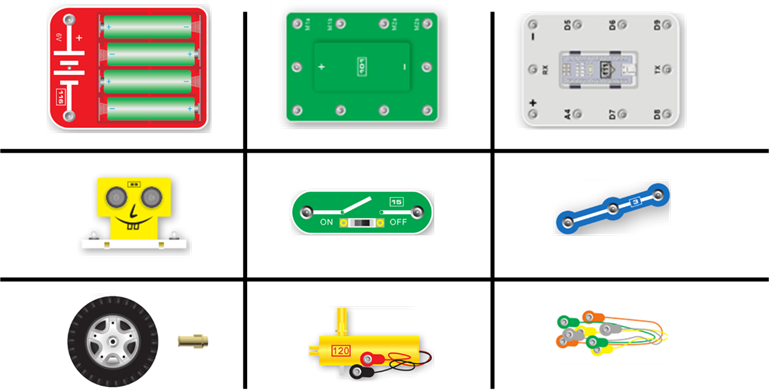
图2 实验材料图
2. 实际搭建图
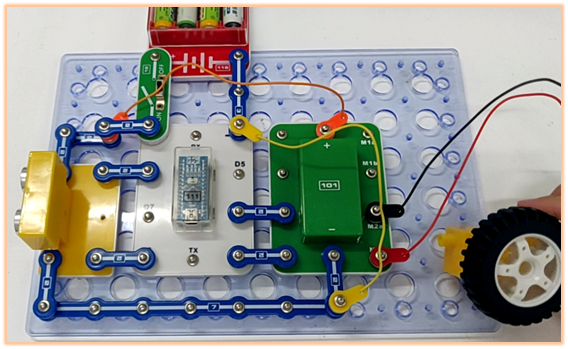
图3 搭建图
四、编程
1. 流程
定义引脚及变量 → 如果大于32cm前进 → 如果29~32cm停止 → 如果小于29cm后退
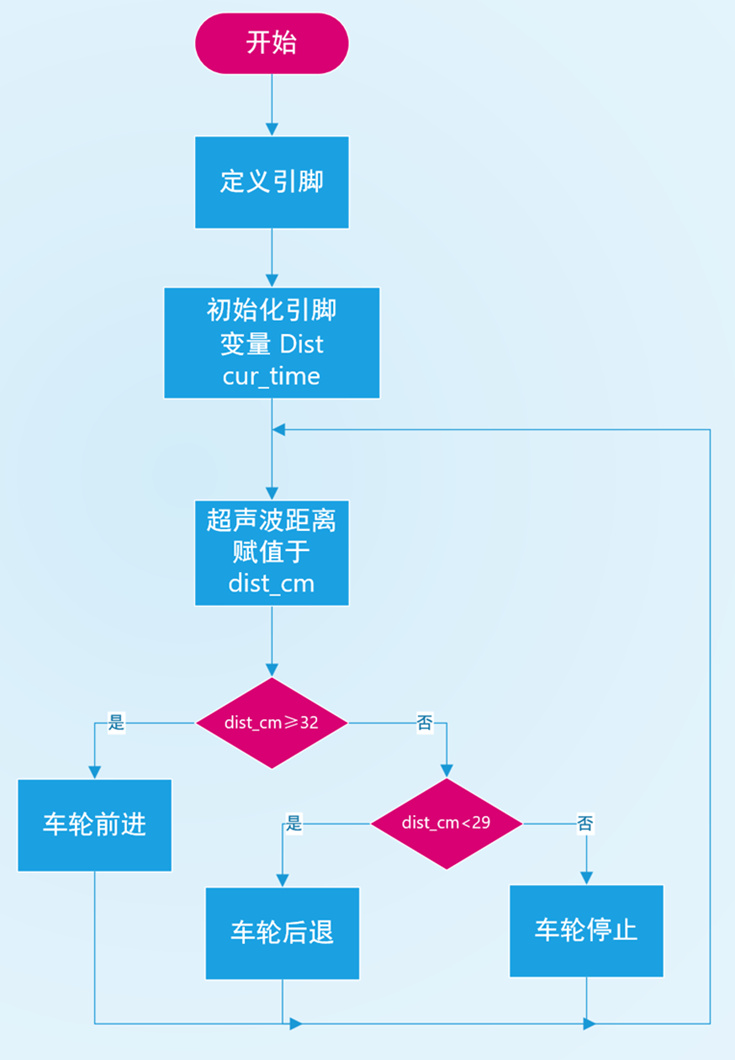
图4 流程图
2. IDE编程
程序要点:
- Setup(初始化函数)中编写定义引脚模式及变量
- Loop(主循环函数)中编写:
- 如果大于32cm车轮引脚一高一低
- 如果小于29cm车轮引脚一低一高
- 如果29~32cm车轮引脚全低电平
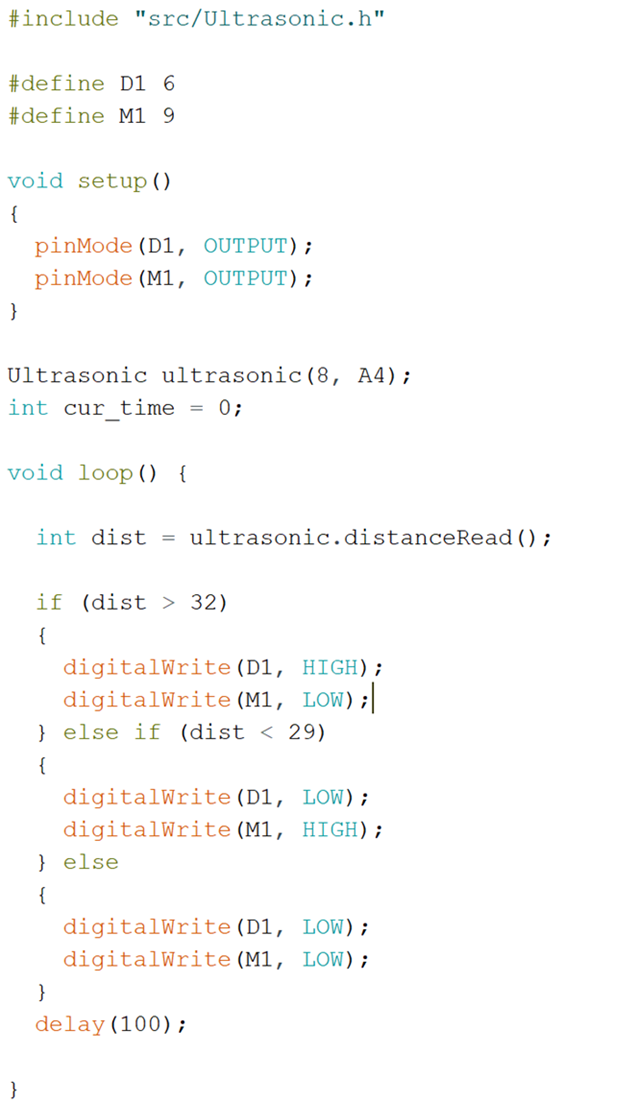
图5 IDE程序截图
3. 米思奇编程
程序要点:
- Setup(初始化函数)中编写定义引脚模式及变量
- Loop(主循环函数)中编写:
- 如果大于32cm车轮引脚一高一低
- 如果小于29cm车轮引脚一低一高
- 如果29~32cm车轮引脚全低电平
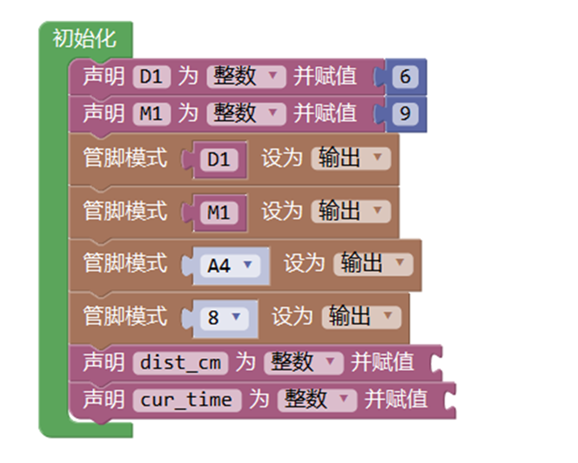
图6 米思奇程序截图1

图7 米思奇程序截图2